









































































































“승패보다 값진 도전 정신을 보여주겠습니다!”
세계 최초 로봇 스키 대회 본선에 진출하다

2018 평창동계올림픽 기간 중인 2월 11일부터 이틀간 스키로봇 챌린지가 열린다. 스키로봇 챌린지는 평창동계올림픽의 오프닝 행사다. 세계 최초로 스키 종목을 휴머노이드 로봇으로 구현한 경진대회다. 대한민국 로봇 산업의 수준을 전 세계적으로 알리는 중요한 행사 중 하나다. 치열한 예선을 거쳐 총 8팀이 본선에 참가하게 됐다. 그중 당당히 도전장을 내민 이들이 바로 국민대학교 로봇 동아리 <KUDOS>(이하 쿠도스)다. 쿠도스 팀의 멤버는 기계공학부 조백규 교수가 지휘하는 멤버 7명으로 구성되어 있다. 그들의 목표는 단순히 1등을 차지하는 것이 아니다. 로봇에 대한 새로운 도전과 경험, 그 자체다.

 쿠도스의 새로운 도전, 스키
쿠도스의 새로운 도전, 스키
로봇 동아리 쿠도스는 2012년 창단됐다. 로봇 축구 대회를 중심으로 출전해왔다. 2013 로보컵 네덜란드 본선 및 16강 진출, 2017 로보컵 일본 본선 진출 등의 성적과 2017년 로보컵 한국 (Robocup Korea Open) 2위에 올라 실력을 입증했다. 로봇 축구대회에 참여하던 동아리가 어쩌다가 스키대회에 참가하게 된 것일까? 한승민(기계공학부 12) 학생은 “새로운 걸 배우고 싶다는 열망으로 도전하게 됐다”며 그 이유를 설명했다.
“조백규 교수님께서 먼저 물어보셨어요. 로봇 스키 대회라는 게 있는데, 참가할 마음이 있냐면서요. 저를 포함한 팀원 모두 로봇 축구만으로는 해소되지 않는 학구열을 갖고 있었거든요. 그래서 모두 도전을 망설이지 않았죠.”
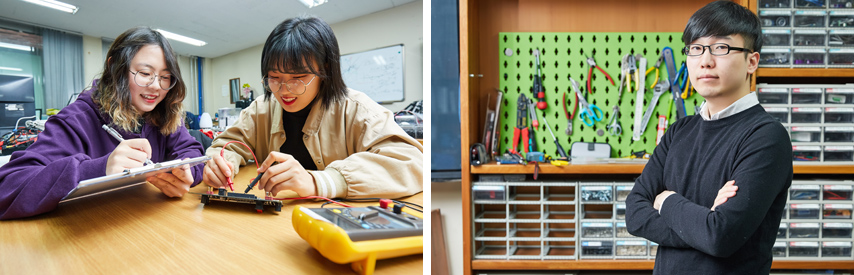
팀은 참가 희망 학생들과 성실한 학생들 위주로 꾸려졌다. 특별한 점은 학부생들이 주축을 이뤄 참가한다는 것이다. 하지만 학과 공부를 병행해야 하는 어려움이 있었다. 맏형으로서 팀을 이끌어온 전호진 박사는 “후배들이 실력이 아직 부족하지만, 로봇을 만들며 성장하는 모습을 볼 수 있어 뿌듯하다”며 후배들과 함께 준비한 소감을 전했다.
“사실 학과 공부를 병행해야 하다 보니까 힘든 점이 없는 건 아니에요. 대회만 집중해도 부족한데, 시험이 겹칠 땐 밤샘 작업은 필수죠. 체력적으로 많이 지쳤을 텐데 항상 밝게 임하는 모습이 보기 좋아요.”

국민대의 로봇(Robot of Kookmin), 평창에 서다!
로봇의 이름은 ROK(이하 로크), Robot of Kookmin(국민대의 로봇)의 약자다. 쿠도스 팀원들은 로크의 성능을 실험하기 위해 매주 월요일 부천의 한 실내 스키장을 찾는다. 이곳에서 8개의 참가팀이 모두 모여 연습을 한다. 하지만 쿠도스 팀은 대부분 학부생으로 이루어져 있기 때문에 수업이 모두 끝난 저녁부터 자정까지 실험에 참여할 수 있다. 매번 로봇과 모니터, 각종 공구들을 챙겨 긴 거리를 이동하는 것이 쉬운 일은 아니다. 로봇 제어 알고리즘과 하체 설계를 담당하고 있는 한윤호(기계공학부 12) 학생은 “실험이 새벽에 끝나 힘들지만, 그래도 꼭 필요한 과정이기에 가장 노력을 기울인다”고 말했다.
“실험을 통해 브레이크 등의 부분에 더 신경 써야 한다는 걸 알게 됐어요. 현재 버전 2를 만드는 중입니다. 하체는 설계가 끝나서 가공이 시작됐고, 상체는 설계 단계를 진행 중이에요. 상체는 PC나 배터리가 많이 바뀌어서 개발이 더 오래 걸릴 예정입니다. 개발은 대회 직전까지 계속될 거예요.”

스키로봇 챌린지는 산업통상부가 주최하고 한국로봇산업진흥원이 주관한다. 이 대회는 한국산업 기술평가관리원 과제에 선정되기도 했다. 대회는 카이스트, 서울과학기술대, 한양대, 명지대, 경북대를 비롯해 한국로봇융합연구원, (주)미니로봇 등 연구기관도 참여한다. 학부생이 아닌 전문가들이 대거 참여해 수준 높은 경쟁이 펼쳐질 것으로 전망된다. 회로 설계 및 센서 시스템 구축을 맡고 있는 김현도(전자공학부 09) 졸업생은 “승패를 떠나 새로운 도전의 기회가 될 것”이라며 각오를 보였다.

“쿠도스는 단순히 로봇 축구만 하는 팀이 아니라 로봇제어연구를 한다는 특성을 갖고 있어요. 이번 대회에서 원하는 수준까지 로봇 제어가 가능할 수 있었으면 좋겠어요. 로봇이 미끄러운 경사면에서 밸런스를 잡는 게 쉬운 일이 아니거든요. 단순히 등수를 떠나 학부 연구생들만의 특별한 포트폴리오를 만들 수 있을 거라 기대해요. 궁극적으로 개개인의 역량이 높아지는 계기가 될 것 같습니다. 하지만 1등을 하면 좋긴 하겠죠? (웃음)”
TECH STORY
[기계적 기술]
국민대학교 쿠도스팀의 휴머노이드 로봇 RoK(Robot of Kookmin)는 각 다리 6개의 자유도(DOF, Degree Of Freedom)와 각 팔 3개, 머리 2개 허리 1개의 총 21개의 자유도를 갖춰, 로봇은 스키를 타는 동작뿐만 아니라 사람이 취할 수 있는 동작 대부분을 수행할 수 있다. 스키를 탈 때 특히 많은 힘이 요구되는 하체부에는 관절 하나당 두 개의 모터를 사용하거나 기어를 붙이는 방식을 통해 충분한 출력을 낼 수 있도록 했다.
쿠도스는 두 가지 버전의 로봇을 제작했다. 두 번째 버전인 RoK2는 RoK1을 보완해 제작한 로봇이다. 영상처리를 위해 PC(조탁 EN1070)가 추가되면서 상체부의 무게가 증가했다. 이를 견디기 위해 기존에 한 개씩 사용했던 하체부 관절 모터를 각각 두 개씩 사용했다. 그리고 기어를 추가해 토크가 부족했던 하체부 강화에 집중했다. 경량화를 위해 하체부 프레임은 카본 파이프를 사용했고, 자연스레 전체적인 크기가 약 1m에서 1.4m 정도로 커졌다.
[알고리즘]
스키 로봇은 실제 스키 선수와 같이 스스로 기문의 위치를 파악하고, 경로를 생성해야 한다. 이를 위해 딥러닝 기법 중 하나인 R-CNN1)을 사용하여 기문의 위치를 파악하며, 파악된 기문의 위치를 기반으로 DWA2)라는 Path Planning 기법을 사용해 결승점까지의 경로를 생성한다. 경로가 결정되면 로봇은 스키 자세를 바꿔 경로를 따라 이동할 수 있도록 하며, 이 과정에서 안정적인 움직임을 위해 ZMP3)와 CoM4)제어를 사용한다.
1) R-CNN : Regions with Convolutional Neural Network Features
2) DWA : Dynamic Window Approach
3) ZMP [Zero Moment Point] : 로봇의 무게 중심에 작용하는 모든 모멘트의 합이 '0'이 되는 지점을 의미함.
이족 보행을 위한 핵심 기술
4) CoM : Center of Mass

ROK, 새 옷 입고 새롭게 도약하다
로크에게는 딱 어울릴만한 의상이 준비되어 있다. 바로 의상디자인학과의 박주희 교수가 제작한 의상이다. 박주희 교수는 “국민대 로고에서 디자인을 따왔다”라며 의상 콘셉트를 밝혔다.
“큰 행사에 우리 학교 대표로 출전하는 거잖아요. 그만큼 국민대의 아이덴티티를 확실하게 심고자 했어요. 로고에 담긴 청색, 황색 등을 포인트로 삼았죠. 더불어 활동성을 위해 옷의 입체감에 많은 공을 들였어요. 팔꿈치, 무릎 등에 절개를 많이 내면 입체감을 줄 수 있죠.”
로크의 옷은 일반 스키복처럼 방수는 물론이고, 완충작용에도 신경 썼다. 또한, 로봇의 팔에 습기가 차지 않도록 속주머니를 만들어 습기제거제를 넣는 등 세심한 노력을 기울였다. 의상 제작 과정이 순탄치만은 않았다. 박 교수는 “사람 옷과 달리 사이즈가 작아 제작 과정에 어려움이 있었다”고 설명했다. “로봇은 사람과 비율도 다르고, 단 하나만 만들어야 해서 제작을 의뢰할 업체를 찾는 데 시간이 좀 걸렸어요. 현재 최종 패턴이 완성된 상태예요. 원단으로 만들고 로봇에 입혀보면서 수정해나갈 계획입니다.”
로봇의 의상은 1월 중 완성을 목표로, 막바지 작업에 박차를 가하는 중이다. 국민대학교가 디자인 특화 대학으로 유명한 만큼 그 결과물이 어떨지 기대를 모으고 있다.





이 코너의 다른 기사















![]()
